
Motors, One Chokepoint: The Engineering Case for NdFeB in Humanoid Actuators
The physics is unambiguous. For compact, high-torque motors inside a human-shaped frame, nothing else comes close.
NdFeB Supply Chain for Humanoid Robotics · Part 2 of 4
There is a particular kind of frustration that engineers know well. It is the frustration of being told by the laws of physics that you have no choice.
I think about this a lot when I look at the current state of humanoid robotics. The companies building these machines — Tesla, Figure, Agility, Unitree, all of them — are running into the same wall. Not a software wall. Not a capital wall. A materials wall. Specifically, a magnet wall.
The problem is simple to state and maddening to solve. If you want to put 40 electric motors inside a machine shaped like a human body — in the ankles, the knees, the hips, the wrists, the fingers — and you want that machine to move smoothly, hold objects without crushing them, and not weigh 200 kilograms, then you need a very specific kind of permanent magnet. You need neodymium-iron-boron. NdFeB. There is no second option.
Not because nobody has tried to find one. People have been trying for decades. The physics simply will not cooperate.
In this piece, I want to walk you through why. Not as a lecture, but as a kind of detective story. We are going to follow the clues — one number at a time — until we arrive at the uncomfortable conclusion that the most ambitious robotics project in human history runs through a handful of mines and refineries in southern China.
The One Number That Rules Them All
Let us start with a concept that sounds more intimidating than it is: BHmax.
BHmax stands for maximum energy product. It measures how much magnetic energy a permanent magnet can store in a given volume. The units are MGOe — mega gauss-oersteds — or, if you prefer SI, kilojoules per cubic meter. The important thing is not the unit. The important thing is what the number means.
Think of BHmax as the magnet’s “energy density.” Just as a lithium-ion battery with higher energy density stores more power in the same package, a magnet with higher BHmax produces more torque in the same volume. If you are building a motor that needs to fit inside a human-shaped forearm — and that forearm needs to look like a forearm, not a fire hydrant — then BHmax is the number that determines whether your design works or does not work.
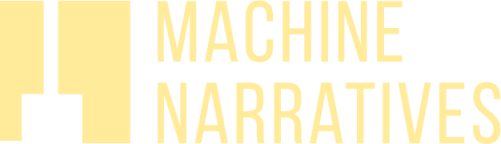
Here is where things get interesting. Look at the numbers for the permanent magnets currently available to engineers:
I want you to notice the gap. Not a small gap. A chasm.
NdFeB N52 stores 11.5 times more magnetic energy per unit volume than the best ferrite ceramic. It stores roughly twice as much as samarium-cobalt, the next-best permanent magnet. This is not a marginal difference. This is the kind of difference that determines whether a hand has five fingers or three. Whether a robot weighs 70 kilograms or 180. Whether it can walk across a room or has to be bolted to the floor.
Engineers did not choose NdFeB because they love rare earths. They chose it because the energy product left them no alternative.
Why Humanoids Are the Worst Possible Application for Substitution
Here is something I find genuinely interesting. When people talk about “reducing rare earth dependence,” they usually point to electric vehicles or wind turbines. Those are big, visible applications. But the truth is, those are the easy cases for substitution.
An EV motor sits in a well-defined space under the hood or between the axles. If you make that motor 30% larger to accommodate a weaker magnet, the car still drives. It might weigh a bit more. The packaging gets tighter. But it works. Engineers have room to negotiate with the physics.
A wind turbine nacelle is enormous. You have space. You can tolerate a heavier generator because the thing is already the size of a bus. Ferrite magnets have actually been making inroads in some wind turbine designs for exactly this reason.
Now consider a humanoid robot hand.
Each hand has somewhere between 12 and 22 degrees of freedom — that is individual joints that need to move independently. Each joint needs its own actuator, or motor. These motors sit inside the fingers, the palm, the wrist. The available volume for each motor is measured in cubic centimeters. Sometimes single-digit cubic centimeters.
If you swap NdFeB for ferrite in a hand actuator, you need a motor roughly three to five times larger to produce the same torque. A finger that was 2 centimeters in diameter becomes 6 centimeters. That is not a finger anymore. That is a sausage.

I think this is the point that gets lost in the policy debates about rare earths. Yes, we should diversify supply. Yes, we should invest in alternatives. But the engineering constraints for humanoids are categorically different from EVs or wind. The robot’s body has to approximate a human form factor. The hands have to be able to pick up a coffee cup without crushing it and also open a jar lid. The legs have to support the robot’s weight and absorb the shock of each step. There is simply no room — zero room — for a motor that is three times too large.
A single humanoid robot in the Tesla Optimus class contains between 500 and 1,100 grams of NdFeB. That is about half a kilogram to a full kilogram of permanent magnets, spread across 40 or more motors. At current prices — roughly $65 to $80 per kilogram for finished magnets — that works out to $35 to $85 worth of magnet material per robot. A trivial cost, really. Two percent or so of the bill of materials.
The cost is not the problem. The availability is the problem. But we will get to that.
The Temperature Trap
Now here is where the story takes a turn. Because if BHmax were the only constraint, we would still have options. Limited options, but options. The real killer — the thing that makes the dependency even more acute — is temperature.