
Power Part 1: The 4-Hour Robot
Why today's most advanced robots still die before lunch.
The Power Problem — A 5-Part Series
1. The 4-Hour Robot
2. The Leg Battery Problem
3. The Watt Tax
4. The Compute Mortgage
5. The $3 Worker
The first thing you notice isn’t the robot. It’s the silence.
A humanoid robot is supposed to be working , stacking pallets, sorting parts, running quality checks on an assembly line. But it has stopped. The arms are limp. The head is tilted slightly, like a person who fell asleep at their desk. The power indicator is flashing red.
Four hours. That’s what it got. Half a shift in a factory that runs on eight.
In this article, why today’s most advanced humanoid robots , machines that can walk, talk, reason, and manipulate objects with startling precision , can barely make it to lunch. And why solving this problem might be worth more than any single AI breakthrough of the last decade.
this is the most under-discussed bottleneck in humanoid robotics. Everyone talks about the software, the dexterity, the safety. But none of that matters if the machine can’t stay awake.
A simple question: Where does the power go?
If you stood next to a humanoid robot on a factory floor and asked it to walk across the room, pick up a box, read the label, and carry it to a conveyor belt, you would see something remarkable. But what you wouldn’t see, what you cannot see, is the quiet war being fought inside the machine’s battery pack.
Every single action the robot takes draws power. Walking draws power. Reaching for the box draws power. Looking at the label with its cameras draws power. Running the AI model that says “that’s a Type-4 carton, destination conveyor C” draws power. Even doing nothing, just standing, balancing, waiting, draws power.
And all of these demands draw from the same limited battery. There is no separate power source for the brain and the legs. There is just one.
It’s a constraint that doesn’t exist in any other form of computing. Your phone has a battery, but it doesn’t walk. A data center draws megawatts, but it doesn’t need to carry its own power supply. A robot is the only computing device that has to carry its entire power budget on its back, literally.
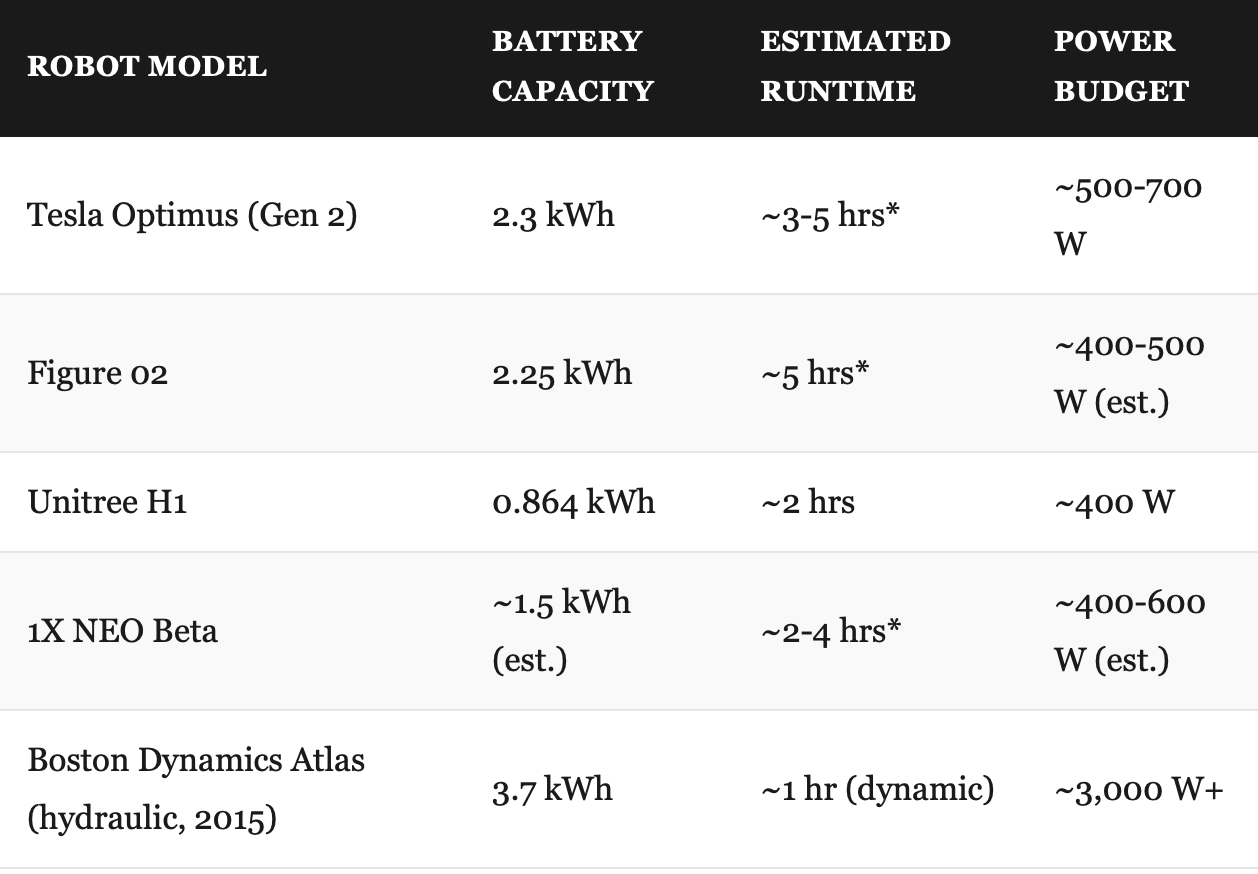
*Estimated runtimes for mixed-task operation (non-continuous walking). Actual runtimes vary dramatically based on task intensity. Data compiled from company specifications, teardowns, and academic power models. Not all figures are independently verified.
Take a moment with those numbers. The Tesla Optimus carries a 2.3 kilowatt-hour battery, roughly equivalent to the battery in a high-end laptop, or about one-thirtieth of a Tesla Model 3's smallest pack. But unlike a laptop, this machine isn't just running a screen and a processor. It's running forty joints, multiple cameras, and an AI inference engine. It's a full-body experience.
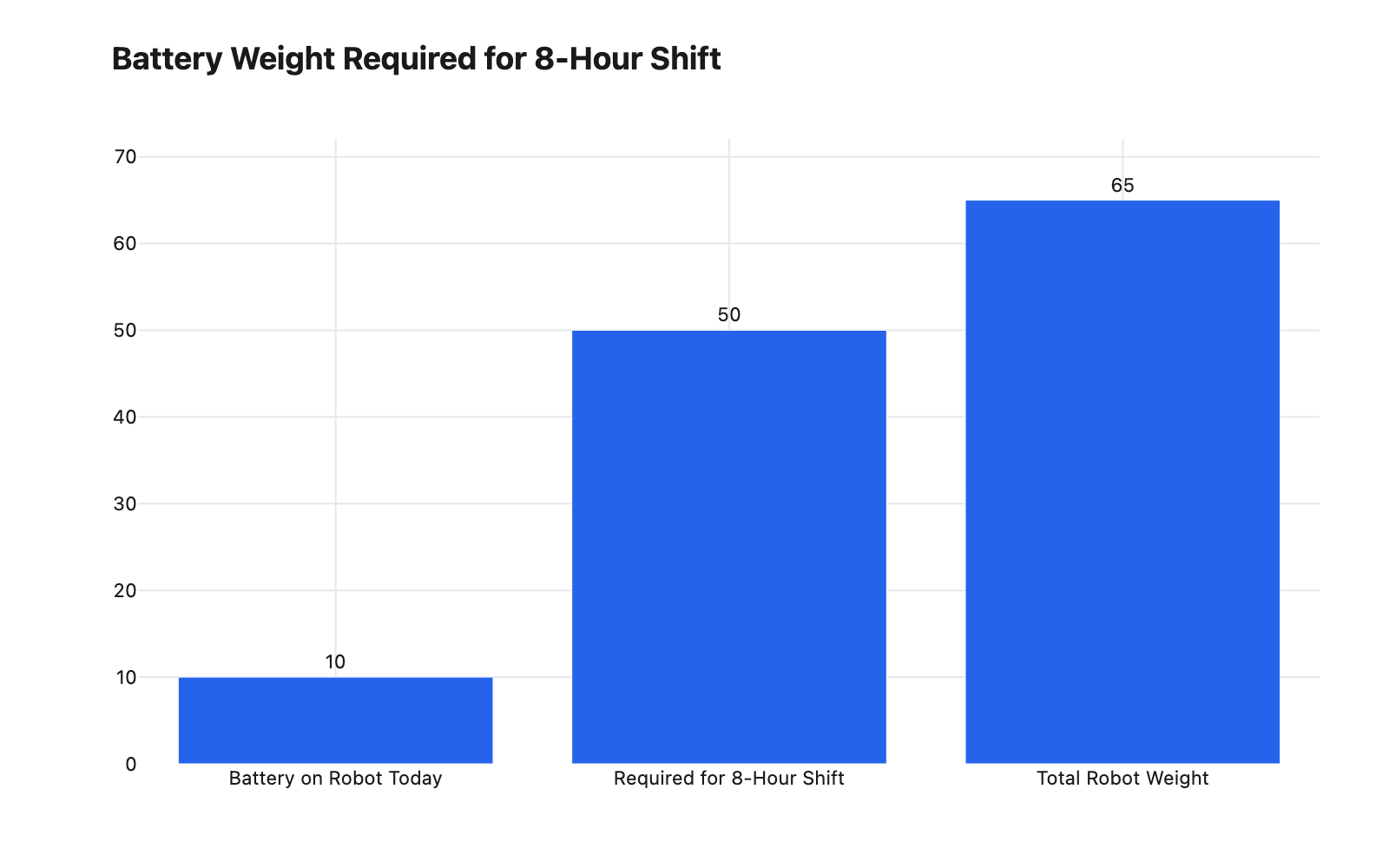
At current battery density, a humanoid robot would need to carry 40-60 kg of battery to run a full 8-hour shift — more than half its total weight. That’s the gap between where we are and where we need to be. Source: Machine Narrative Research, assumes 1,000W draw at 200-250 Wh/kg pack density.
The biggest number in that table, though, isn't the battery capacity. It's the runtime. Nobody, not Tesla, not Figure, not Unitree, has published a verified eight-hour continuous runtime. Not once.
A story from the early days of portable computing
Let me tell you a story that frames this problem.
In 1981, a startup called Osborne Computer Corporation released the Osborne 1, the first commercially successful portable computer. It weighed 24 pounds, had a five-inch screen, and no battery. You had to plug it into a wall.
The dream of portable computing, a computer you could actually carry anywhere and use truly wirelessly, took another decade of battery chemistry advances, screen efficiency improvements, and processor power management innovations before it actually worked. The first Macintosh Portable in 1989 used a lead-acid battery that weighed almost as much as some modern ultrabooks by itself. It wasn’t until lithium-ion went mainstream in the mid-1990s that “portable” really meant portable.
Humanoid robots are at the Osborne 1 stage of their battery journey. They technically exist. They technically work. But they are tethered, not by a power cord, but by the brutal math of watt-hours per kilogram.
And the gap between where we are and where we need to be is not small.
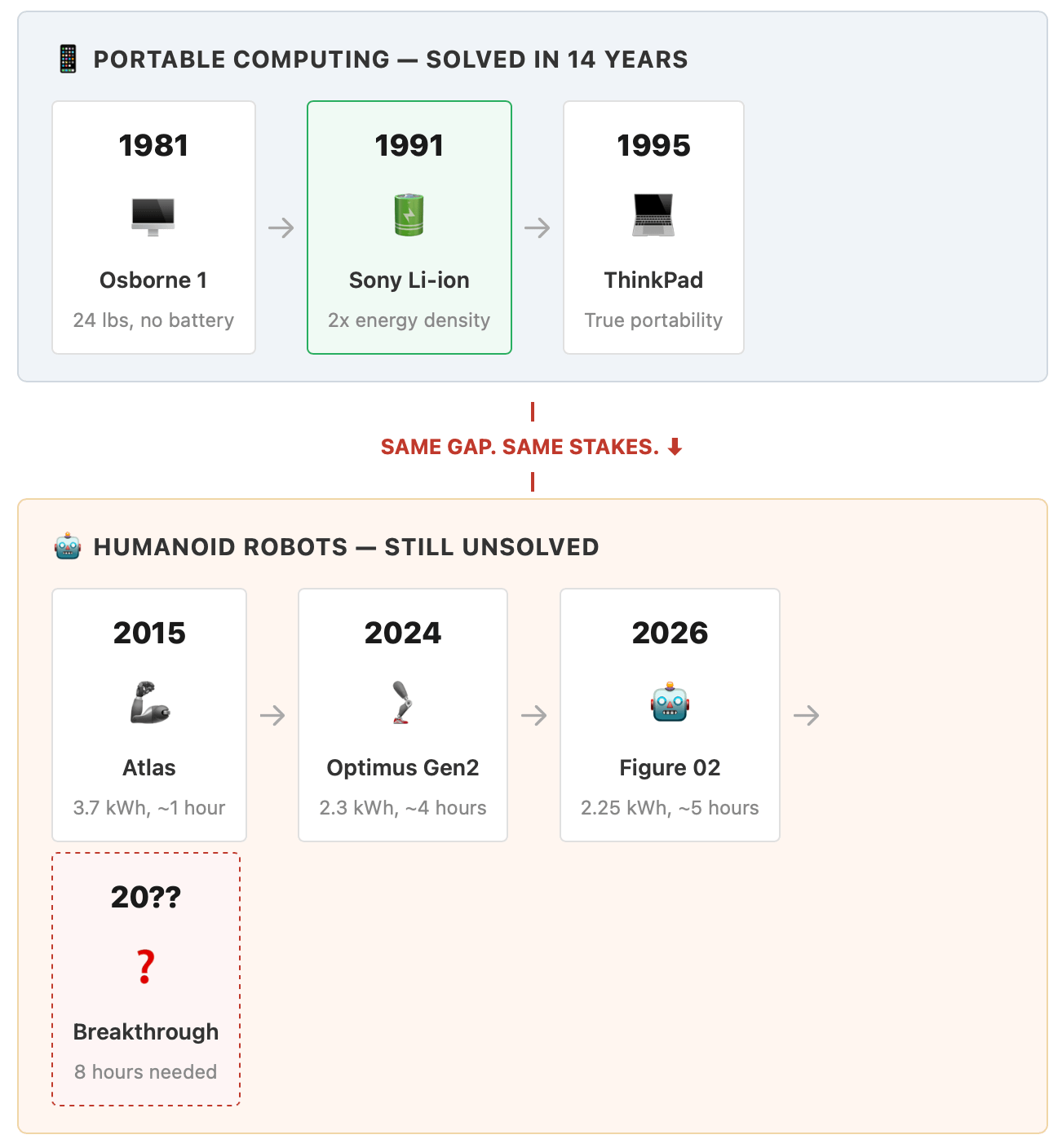
Parallel histories, parallel bottlenecks. Portable computing needed lithium-ion to cross the chasm. Humanoid robots are waiting for their equivalent chemistry breakthrough. Source: Machine Narrative Research.
The 1,000-watt problem
Let’s be precise about what a humanoid robot is spending its power on. It shows you where the leverage is, and where it isn’t.
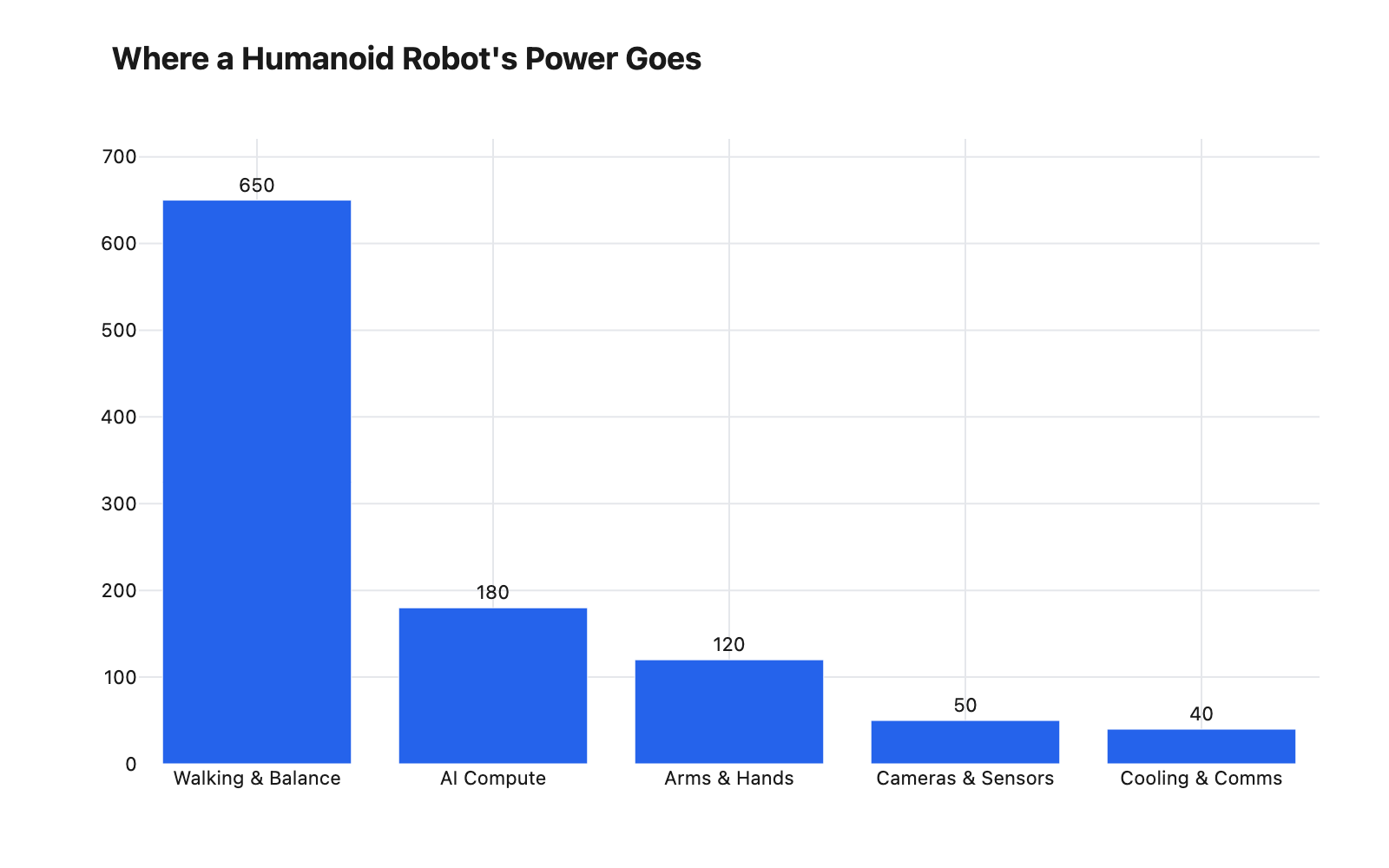
Estimated steady-state power budget during active factory operation (~1,040 W total). Locomotion, just walking around, consumes more power than every other system combined. Source: Machine Narrative Research estimates based on published humanoid specs and academic power models.
Let that sink in. More than sixty percent of the robot’s total power goes to its legs. Just walking. Not thinking. Not seeing. Not picking things up. Just staying upright and moving from point A to point B costs 650 watts, about the same as a high-end gaming PC running at full tilt.
The compute, the AI brain that makes the robot “smart”, burns another 180 watts. That’s the equivalent of a dedicated GPU running inference continuously. And it has to run continuously, because the robot never stops needing to know where it is, what it’s looking at, and what to do next.
Add in the arms and hands (120 watts), the cameras and sensors (50 watts), and the cooling and communication systems that keep everything from melting (40 watts), and you’re at just over a kilowatt of steady-state draw.
A robot that draws 1,000 watts from a 2,000 watt-hour battery runs for two hours, in theory. In practice, battery systems typically can’t deliver their full rated capacity at high continuous draw rates without voltage sag or thermal throttling. The achievable runtime is even shorter than the math suggests.
THE ENERGY DENSITY MATH
A modern lithium-ion cell delivers roughly 250-300 Wh/kg at the cell level. At the pack level, factoring in BMS, cooling, and structural housing, you’re looking at more like 200-250 Wh/kg for even advanced designs.
To run a 1,000-watt humanoid for a full 8-hour shift, you need roughly 10-12 kWh of usable battery capacity, factoring in depth-of-discharge limits and efficiency losses.
That’s about 40-60 kilograms of battery, using realistic pack-level density. On a 65-kilogram robot. More than half the machine’s mass would need to be battery, possibly two-thirds.
Today’s best humanoids carry 2-12 kilogram battery packs. The math simply does not close with current chemistry.
Why nobody talks about the 90% problem
Here’s something interesting about how humanoid robot companies talk about energy. They mostly don’t.
Tesla mentions that Optimus has a 2.3 kWh battery pack and targets “a full day of work.” Figure says the 02 runs for five hours. Unitree lists a 2-hour runtime in the H1 specs and moves on. Nobody publishes sustained runtime curves across different task profiles. Nobody shows the battery discharge curve with all systems active at once.
This isn’t dishonesty. It’s that the numbers are bad, and there’s no way to spin them. If you say “our robot can work for four hours,” a factory manager calculates: three shifts per day, two robots per station, plus charging infrastructure, plus the floor space for charging bays, and suddenly your labor-cost math gets a lot less compelling.
The 4-hour gap is where the deployment math breaks. A robot that works half a shift isn't half as valuable, it may be closer to zero, because factories are designed around full-shift labor. Source: Machine Narrative Research.
The reality at the center of this: getting a robot to work for six hours is engineering. Getting it to work for eight, a full shift, requires a physics breakthrough. Battery cells have improved in energy density at roughly 5-8% per year for the last decade. At that rate, the crossover point where a 65-kilogram robot can carry enough battery for an 8-hour shift is somewhere in the early 2030s.
Unless the chemistry changes.
The thing most people miss about this problem
Let’s be creative for a moment. What happens if battery density doesn’t improve fast enough?
There is a world where humanoid robots don’t wait for better batteries. They simply get more efficient. The actuators get lighter and more power-dense. The compute moves to more specialized, lower-power chips. The perception stack runs on dedicated vision processors instead of general-purpose GPUs. The walking gait gets optimized until the robot uses 250 watts to walk instead of 650.
This is not science fiction. It is exactly what happened in portable computing between 1995 and 2010. The batteries got better, yes, but the chips got orders of magnitude more efficient. An iPhone today does more computation on a smaller battery than a 1990s laptop could dream of.
The same efficiency revolution has to happen in robotics.
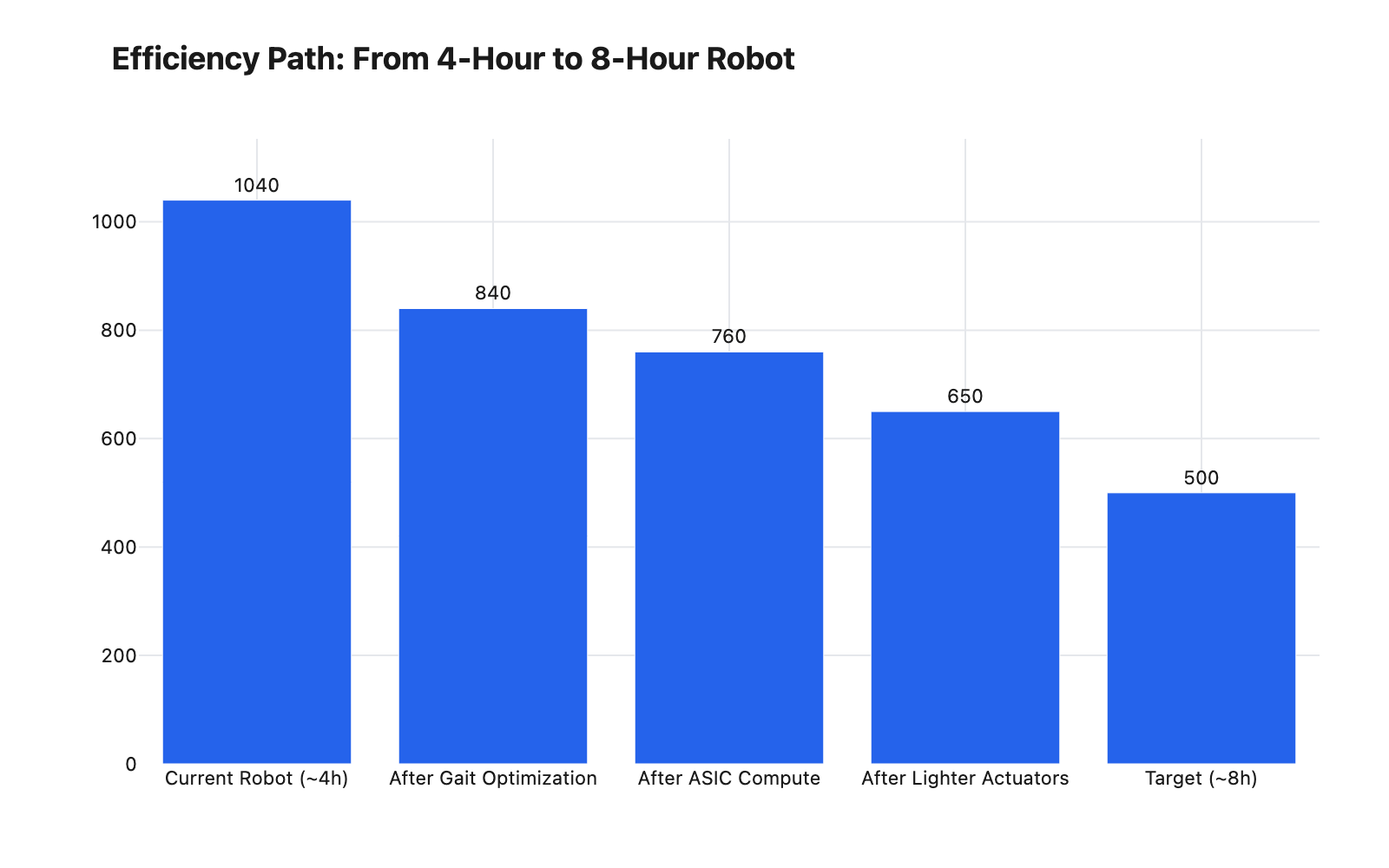
The path to an 8-hour robot runs through efficiency, not just better batteries. Each step, gait optimization, ASIC compute, lighter actuators, compounds to nearly halve the power budget. Source: Machine Narrative Research projections.
It will create a new hierarchy among robot companies, the ones that control their actuator supply chain and compute architecture will have an enormous advantage over the ones buying off-the-shelf. Efficiency isn’t a spec you can bolt on at the end. It’s designed in from the beginning.
This is where I’d start paying attention if I were an investor. The companies that are vertically integrated, that design their own actuators, optimize their own compute, build their own battery management systems, are the ones that can squeeze out those extra 30-50% efficiency gains. Companies buying commodity motors and GPUs from suppliers are stuck with whatever efficiency those suppliers shipped.
Tesla, for what it’s worth, designs its own actuators for Optimus. Figure designs its core technologies, actuators, hands, batteries, and final assembly, in-house, using external vendors for piece-part manufacturing. That’s a meaningful degree of vertical integration, and it shows in how Figure talks about cost reduction. Unitree’s cost advantage partly comes from accepting standard components.
A historical echo that worries me
Consider how drastic the change was when lithium-ion went from lab curiosity to global standard.
The first commercial lithium-ion battery was shipped by Sony in 1991. Before that, portable electronics used nickel-cadmium or nickel-metal-hydride cells, heavier, lower capacity, and prone to “memory effect” that reduced usable capacity over time. The shift to lithium-ion roughly doubled the energy density available to product designers almost overnight.
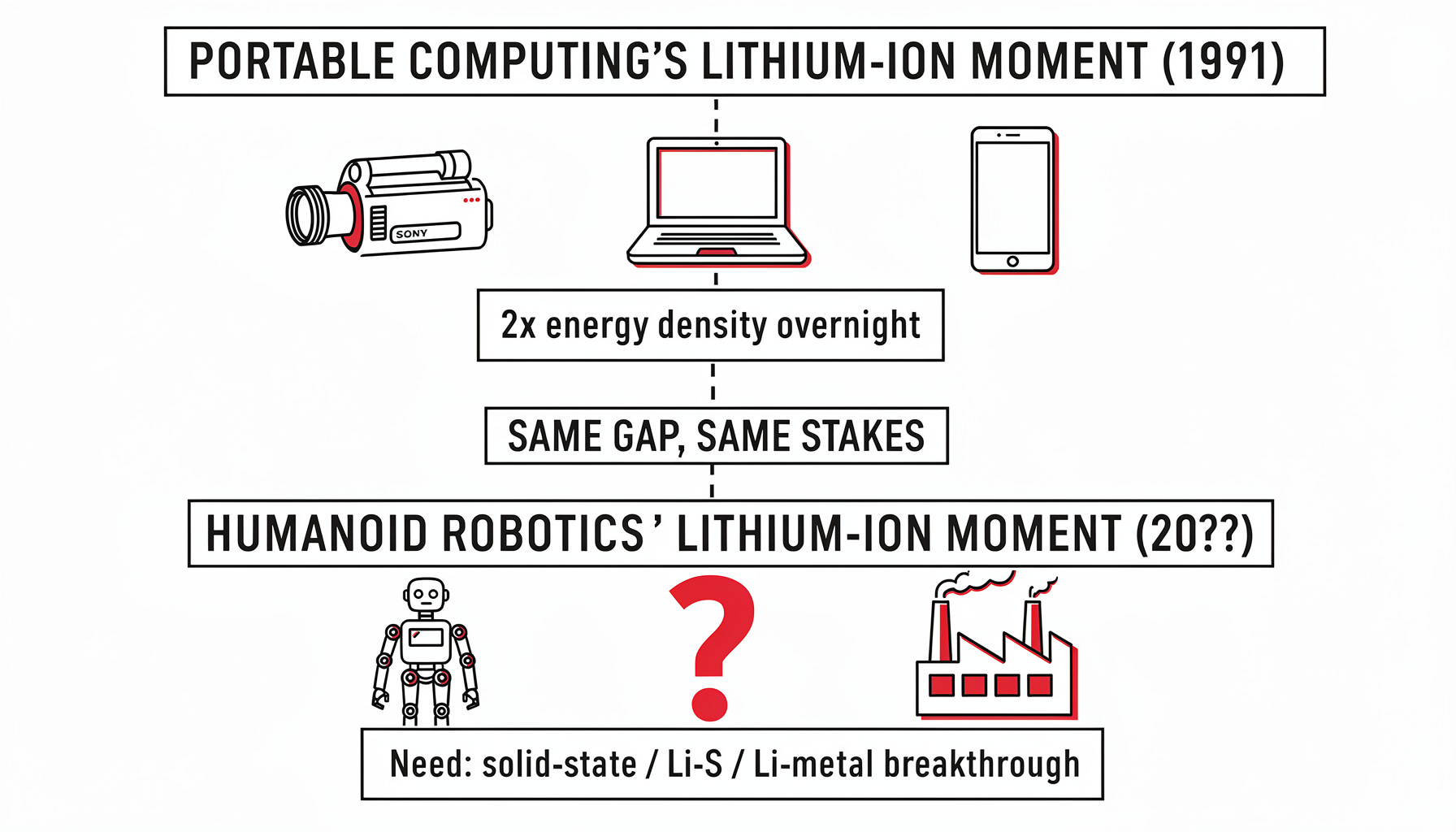
Portable computing got its breakthrough in 1991 when Sony shipped the first commercial lithium-ion battery. Humanoid robotics is still waiting for its equivalent, solid-state, lithium-sulfur, or lithium-metal chemistry at commercial scale. Source: Machine Narrative Research.
The humanoid robot industry needs a lithium-ion moment. It needs a battery chemistry that roughly doubles the energy density currently available at the pack level, from ~200-250 Wh/kg to something closer to 500-600 Wh/kg. Solid-state batteries, lithium-sulfur, and lithium-metal designs are the leading contenders. All of them are in various stages of lab-to-factory transition. None of them are shipping in volume at the form factor a humanoid needs.
The entire humanoid robotics deployment thesis, the factories, the warehouses, the elder care applications, depends on a battery chemistry that does not yet exist in a commercially viable form. That’s not pessimism. That’s the math.
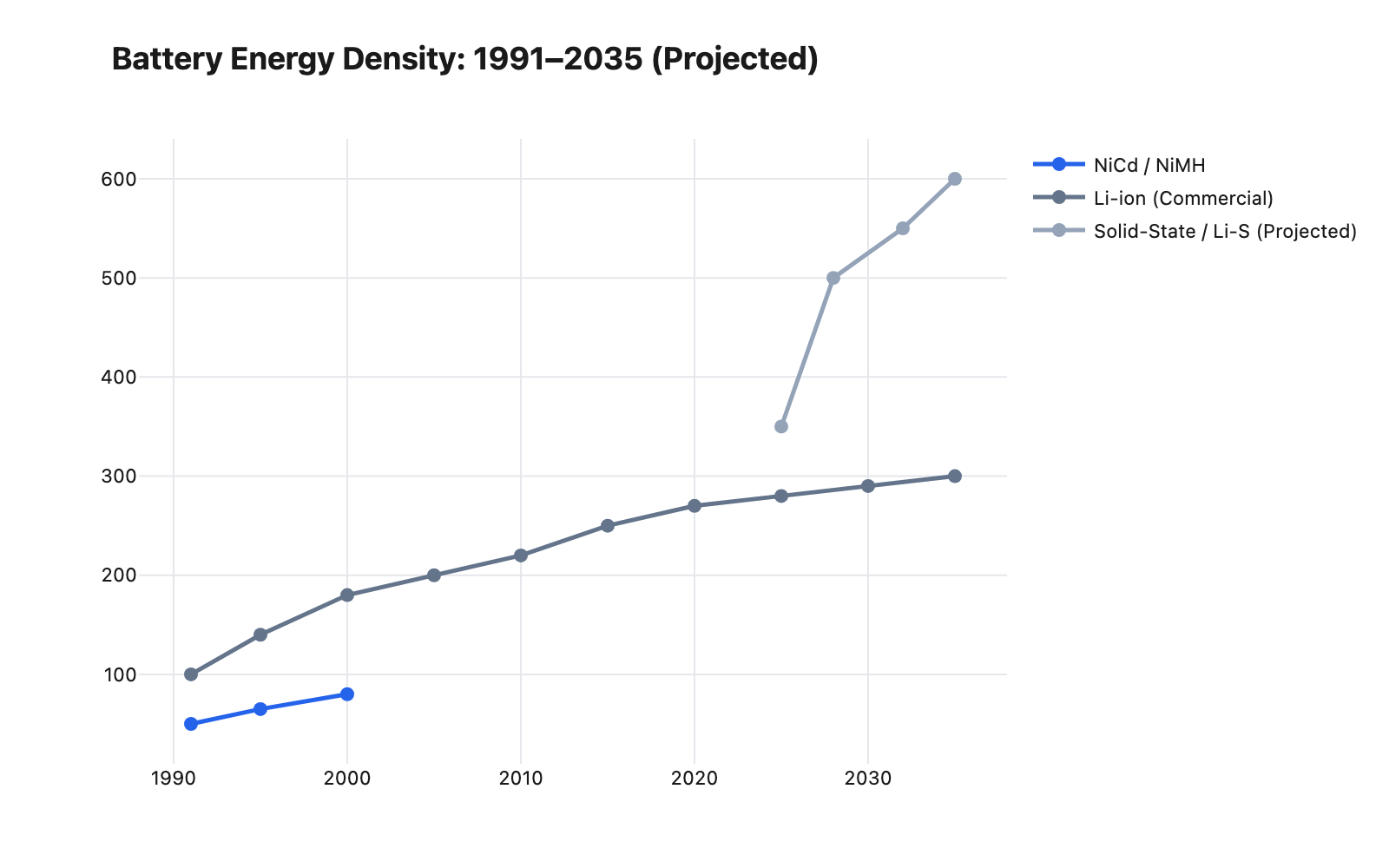
Battery energy density has improved at 5-8% per year for three decades. At that rate, the 500+ Wh/kg needed for an 8-hour humanoid robot arrives in the early 2030s, unless solid-state or lithium-sulfur chemistries accelerate the timeline. Source: DOE Battery500, BloombergNEF, Nature Energy.
So where does this leave us?
The 4-hour robot is where we are. It’s a machine of extraordinary capability that collapses on the factory floor before lunch. It’s a $50,000 platform whose entire economic case hinges on something that fits in a backpack-sized compartment in its torso.
Over the next four articles in this series, I want to walk through the pieces of this problem one at a time. The battery chemistry question, why EV cells don’t work for legs, and who’s building robot-specific cells. The actuator efficiency challenge, why your knees are more efficient than any motor humanity has ever built, and how close we can get. The compute power tax, why running an AI model on a walking machine creates a thermal problem that data center engineers never have to think about. And finally, the investment thesis: who wins when the first robot clocks an 8-hour shift, and what that moment is actually worth.
this series matters because I believe humanoid robots are coming, and coming faster than most people expect. But I also think the energy barrier is real, and it will separate the companies that succeed from the ones that generate excellent demos and die in pilot programs.
THIS IS PART 1 OF “THE POWER HUNGER OF THINKING MACHINES”
Part 2: The Leg Battery Problem — Why EV cells fail in walking machines
Part 3: The Watt Tax — Actuator efficiency and the $/step equation
Anyways. I’ll be curious to see what these runtime numbers look like a year from now — and whether any of the big players have broken past four consistent hours in a real factory setting, not a demo.
I think someone will. But I don’t think it’ll be the company most people expect.