
Power Part 2: The Leg Problem
Why EV batteries fail inside walking machines.
The Power Problem — A 5-Part Series
1. The 4-Hour Robot
2. The Leg Battery Problem
3. The Watt Tax
4. The Compute Mortgage
5. The $3 Worker
In 1991, Sony shipped the first commercial lithium-ion battery. It was a cylindrical cell, 18 millimeters across, 65 millimeters tall. You have almost certainly held one. They call it the 18650, and for the next three decades, this little metal tube would become the default shape of stored energy. It powers laptops, power tools, electric cars, and, reluctantly, walking robots.
The 18650 is a beautiful piece of engineering. It is cost-optimized, supply-chain-proven, and produced at a scale of billions of units per year. When Tesla decided to build the Model S, they didn’t design a custom battery. They bought 6,831 little metal tubes and wired them together. The design was elegant in its own way: a flat chassis floor, a rectangular battery compartment, and thousands of identical cylinders packed like sardines.
But a humanoid robot does not have a flat chassis floor.
The shape that started it all
Let us start with the 18650 itself. The name tells you everything you need to know: 18 millimeters in diameter, 65.0 millimeters in height. The naming convention is literally just the dimensions, which I find charming in its industrial honesty. A 21700 cell is 21 by 70 millimeters. A 4680 cell. Tesla’s latest, is 46 by 80 millimeters.
These cylinders are not an accident of physics. They are an accident of manufacturing economics. When you wind a battery, rolling up layers of cathode, anode, and separator into a spiral, the natural shape is a cylinder. The “jelly roll” construction that gives the 18650 its cylindrical form is also what makes it cheap: the winding machine just spins, the can slides on, the electrolyte gets pumped in, and the whole thing seals shut. It is a stunningly efficient manufacturing process that produces a stunningly awkward shape for a thigh.
Here are the numbers that matter for what we are discussing:
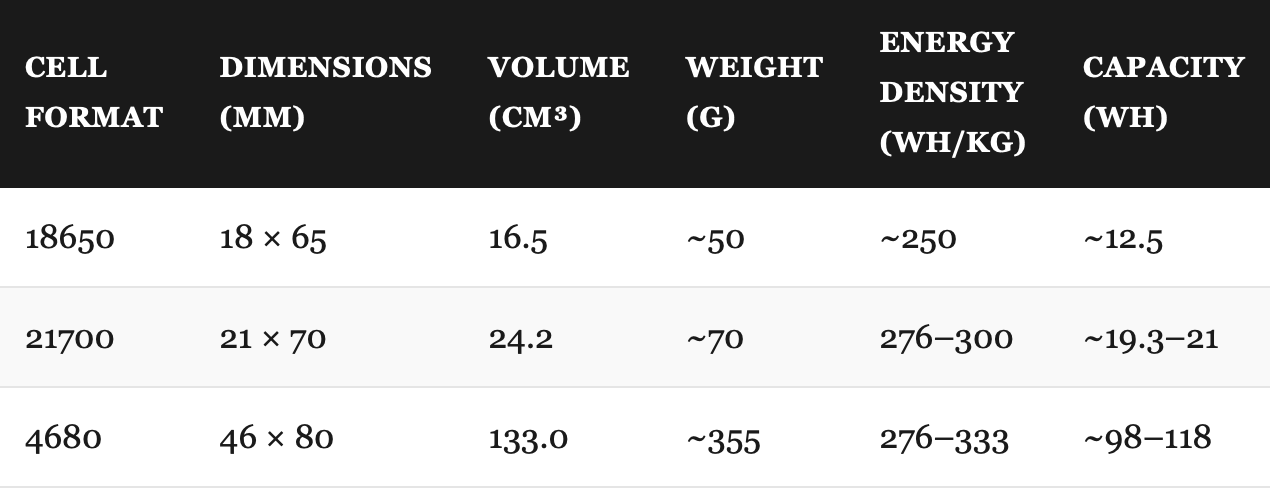
Source: Battery Design, HighStar Lithium. Energy density ranges reflect NMC cathode formulations. Pack-level density is typically 34% lower due to BMS, cooling, and structural housing.
I want you to look at the rightmost column. A single 18650 holds about 12.5 watt-hours. The Tesla Optimus carries a 2,300 watt-hour battery pack. To build that pack from 18650s, you would need roughly 184 individual metal tubes, plus the wiring, the battery management system, the cooling hardware, the structural housing that holds them all in place. And all of that has to fit inside a torso that is roughly the size of a human ribcage, shaped like an inverted teardrop, and already occupied by motors, wiring harnesses, sensor arrays, and compute modules.
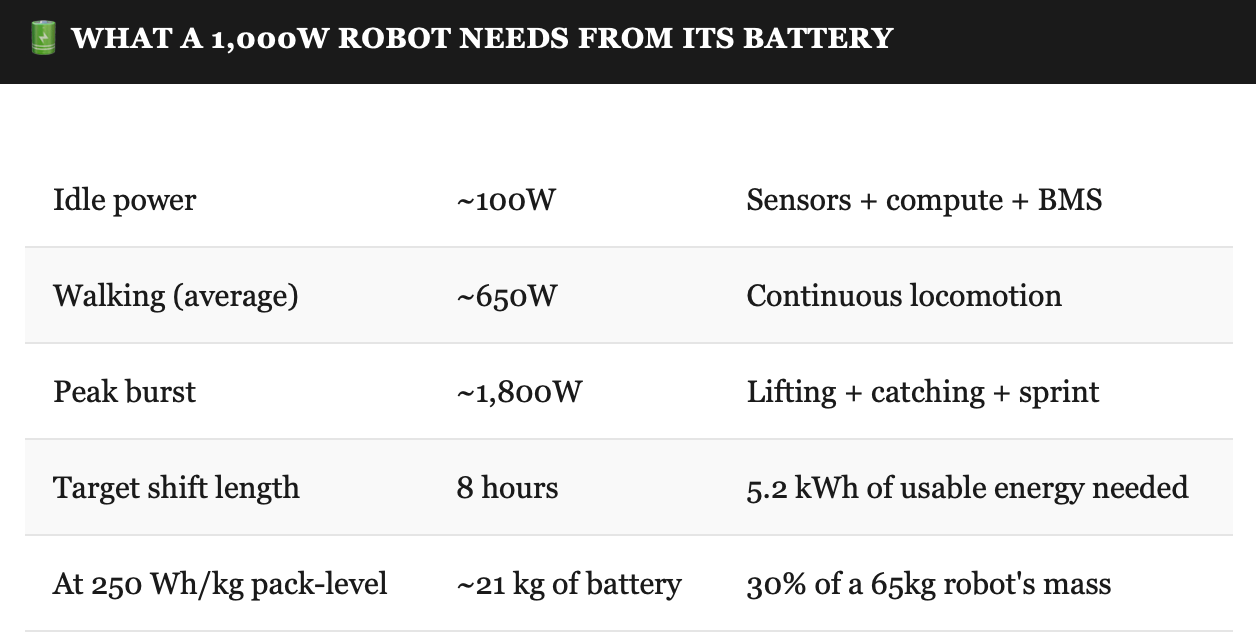
The elementary arithmetic of robot batteries. At current energy densities, energy storage consumes a third of the robot's mass budget, before you account for motors, structure, or compute. Source: Machine Narrative Research.
This is the leg battery problem. It is not that we lack the energy. It is that the energy comes in the wrong shape.
Why an EV battery pack is a terrible leg
If you have ever looked at an EV battery teardown, and I recommend it, it is fascinating, you will notice something immediately. The pack is a flat rectangle. The cells sit in rows, standing upright or laid on their sides, packed into modules that are packed into a flat floor pan. The entire structure is optimized for something that is essentially a skateboard. A 65-kilogram humanoid robot does not have a skateboard. It has two legs, a pelvis, a torso, and a head. The available volume for energy storage is, to put it mildly, architecturally hostile.
There are three distinct problems that cylindrical EV cells create when you try to put them in a walking machine. it is worth walking through each one.
First, the packing fraction problem. When you pack cylinders into a rectangular box, at best you fill about 91% of the volume, the theoretical maximum for circles in a plane. In practice, with the spacing needed for thermal management and structural integrity, you are looking at more like 70-75% volume utilization. The remaining 25-30% of the battery compartment is wasted air. In an EV, this is acceptable because the floor pan is large enough that the penalty is absorbed. In a humanoid torso that can hold maybe 10-15 liters of battery at the absolute maximum, losing a quarter of that volume to empty space is catastrophic.
Second, the center of mass problem. A humanoid robot is bipedal. It balances on two feet. The placement of every gram matters for stability, gait efficiency, and fall recovery. Cylindrical cells want to be arranged in grids, which creates rectangular blocks of mass that cannot easily follow the organic contours of a chest cavity or a thigh. Put the battery in the torso, and the robot is top-heavy. Distribute it through the legs, and you have lumpy cylinders interfering with joint range of motion. There is no good answer with a cylindrical cell, only less-bad compromises.
Third, the thermal problem. Walking draws bursts of high current, a humanoid robot going from standing still to lifting a 20-kilogram box can spike its power draw from 100 watts to over 1,000 watts in under a second. Cylindrical cells, with their wound internal structure, have relatively high internal resistance compared to pouch or prismatic designs. Under burst loads, they heat up unevenly, with the center of the “jelly roll” running hotter than the outer layers. This thermal gradient accelerates degradation and creates hot spots that trigger the battery management system to throttle power, precisely when the robot needs it most. An EV accelerates gradually. A robot takes a step.
THE BURST VS. STEADY PROBLEM
An EV drawing 20 kW to accelerate from 0-60 mph is pulling about 5C from a 4,000-cell pack, around 5 amps per cell, well within the comfort zone.
A humanoid robot spiking from 100 W idle to 1,000 W during a lift from a 100-cell pack is pulling 10C, or roughly 30 amps from a single 18650 cell.
At 10C, internal heating becomes significant, voltage sag is pronounced, and effective usable capacity drops by 15-25% compared to the rated 0.2C capacity.
The same battery chemistry under these two different loading profiles produces two different machines.
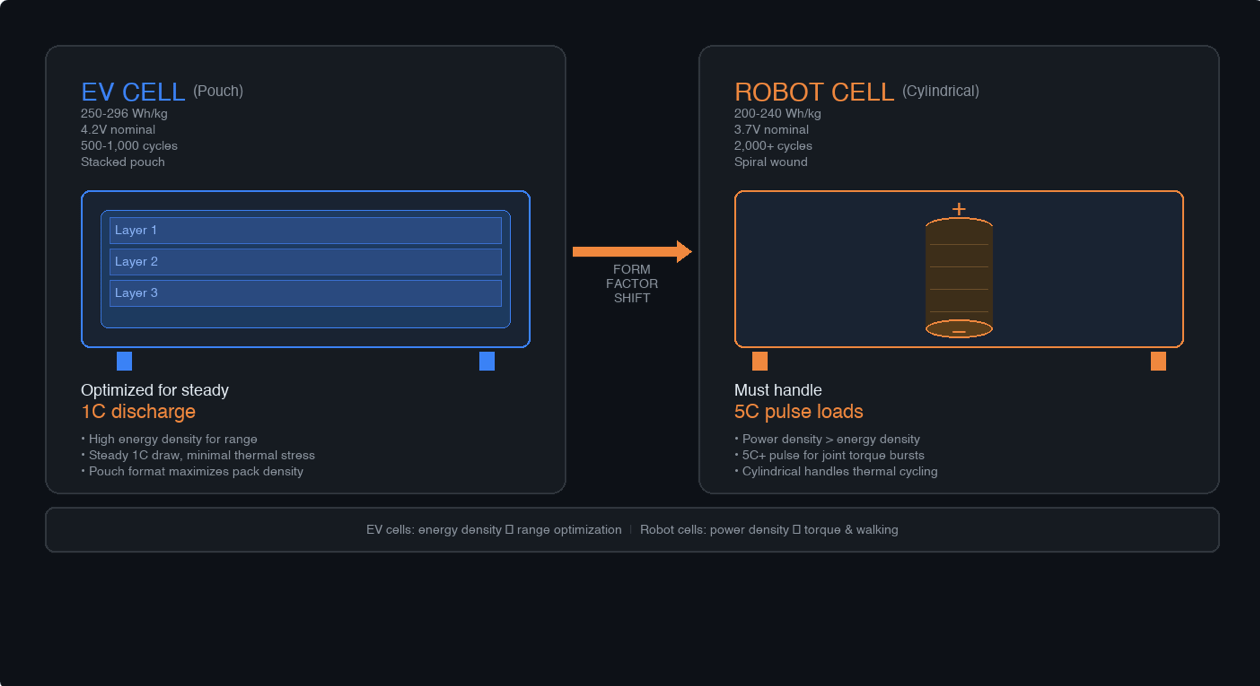
EV cells are engineered for steady discharge at moderate C-rates. Robot cells must survive violent pulse loads — walking, lifting, catching a stumble — that create thermal and mechanical stress no automotive cell was designed for. Source: Machine Narrative Research.
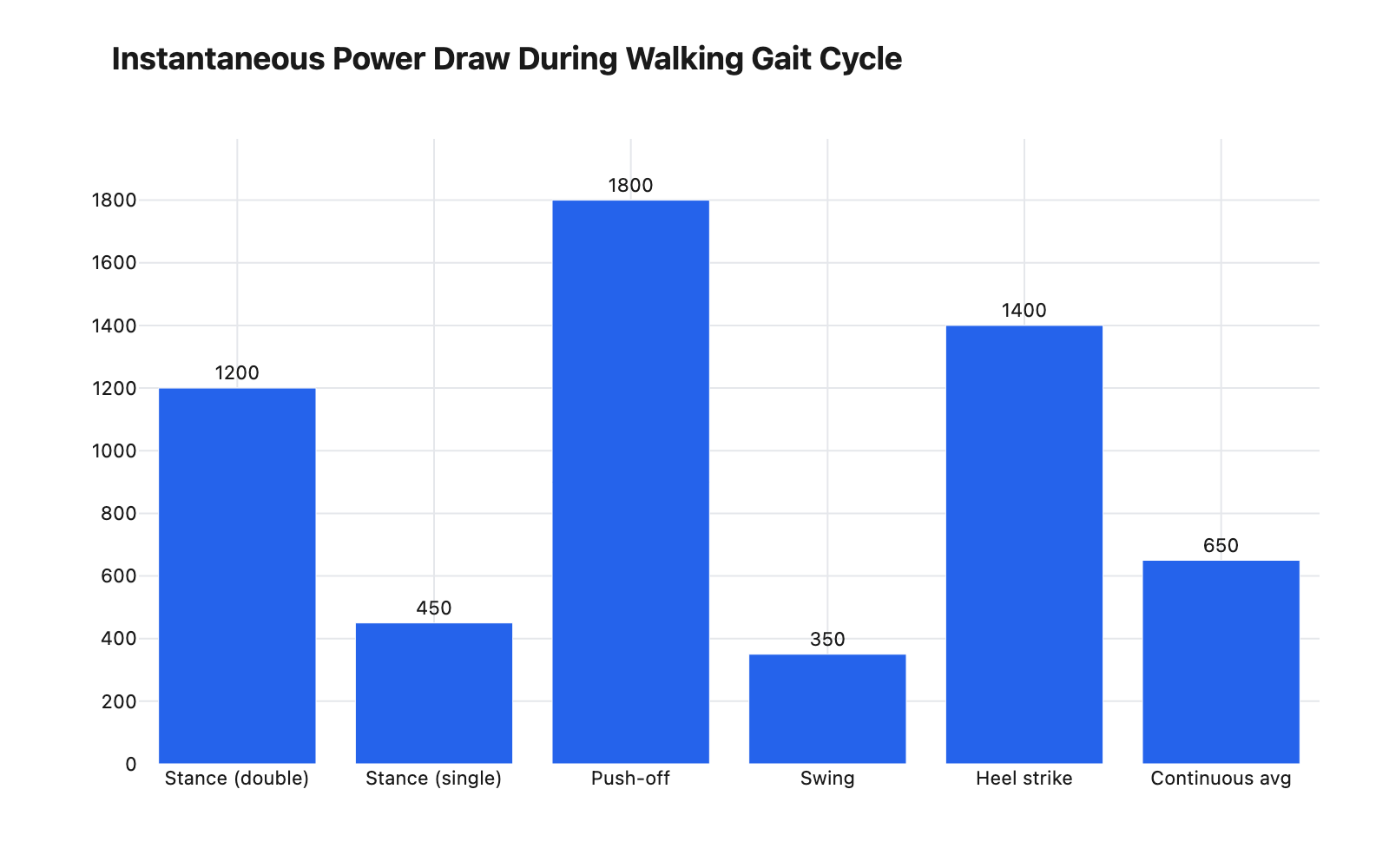
A humanoid robot’s power draw is anything but steady. Walking creates 3-5x spikes in instantaneous demand — the battery must deliver peak power at a moment’s notice without voltage sag triggering a BMS shutdown. Source: Machine Narrative Research based on published bipedal gait models.
The shape of batteries to come
Look at what happens when engineers are freed from the cylinder.
Pouch cells, flat, flexible, laminated packages of electrode layers, are perhaps the closest we have to a robot-native battery format today. Instead of a metal can, a pouch cell wraps the active materials in a thin aluminum-polymer laminate. The result is something that looks more like a high-tech envelope than a battery. You can make them thin, as little as a few millimeters, and shape them to follow curved surfaces. You can stack them, bend them, and fit them into spaces that would make a cylindrical cell engineer weep.
The trade-off is real, though. Pouch cells lack the rigid mechanical protection of a metal can. They swell slightly with age and cycling, which means you need to leave expansion gaps in the pack design, gaps that cost volume. Their energy density at the cell level tends to be lower than the best cylindrical cells, more like 180-240 Wh/kg, because the flexible packaging is less space-efficient than a thin steel can. But at the pack level, the math reverses. When you can fill 95% of the available volume instead of 70%, the system-level Wh/kg can actually exceed what you get from cylindricals, even if each individual cell stores less.
This is the counterintuitive thing about robot battery design. The best cell on a spec sheet is often not the best cell when it is sitting inside a thigh.
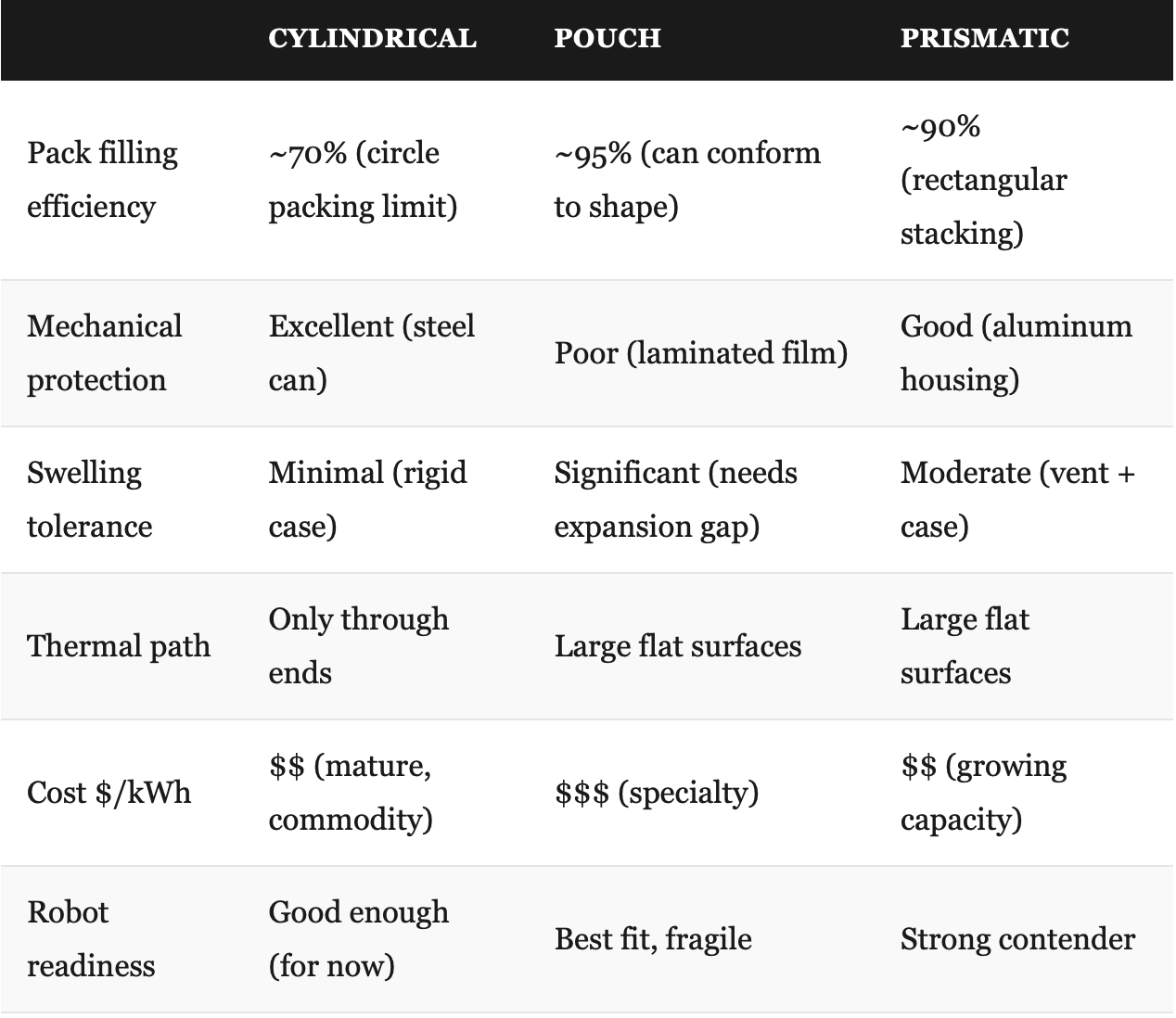
No single format wins on all dimensions. Cylindricals are proven but waste space. Pouches conform beautifully but need armor. Prismatics split the difference. The robot industry is still experimenting. Source: Machine Narrative Research.
Prismatic cells represent a middle path. They use a rigid rectangular aluminum housing, more protective than a pouch, more space-efficient than a cylinder. The internal structure can be either wound (like a flattened jelly roll) or stacked (like a pouch). Prismatics have become the dominant format in Chinese EVs, supplied by companies like CATL and BYD, and they share many of the same advantages for humanoid robots: high packing efficiency, good thermal contact surfaces, and the ability to serve as partial structural elements.
But the format that I think matters most, the one that could change the shape of this problem, is something called a structural battery.
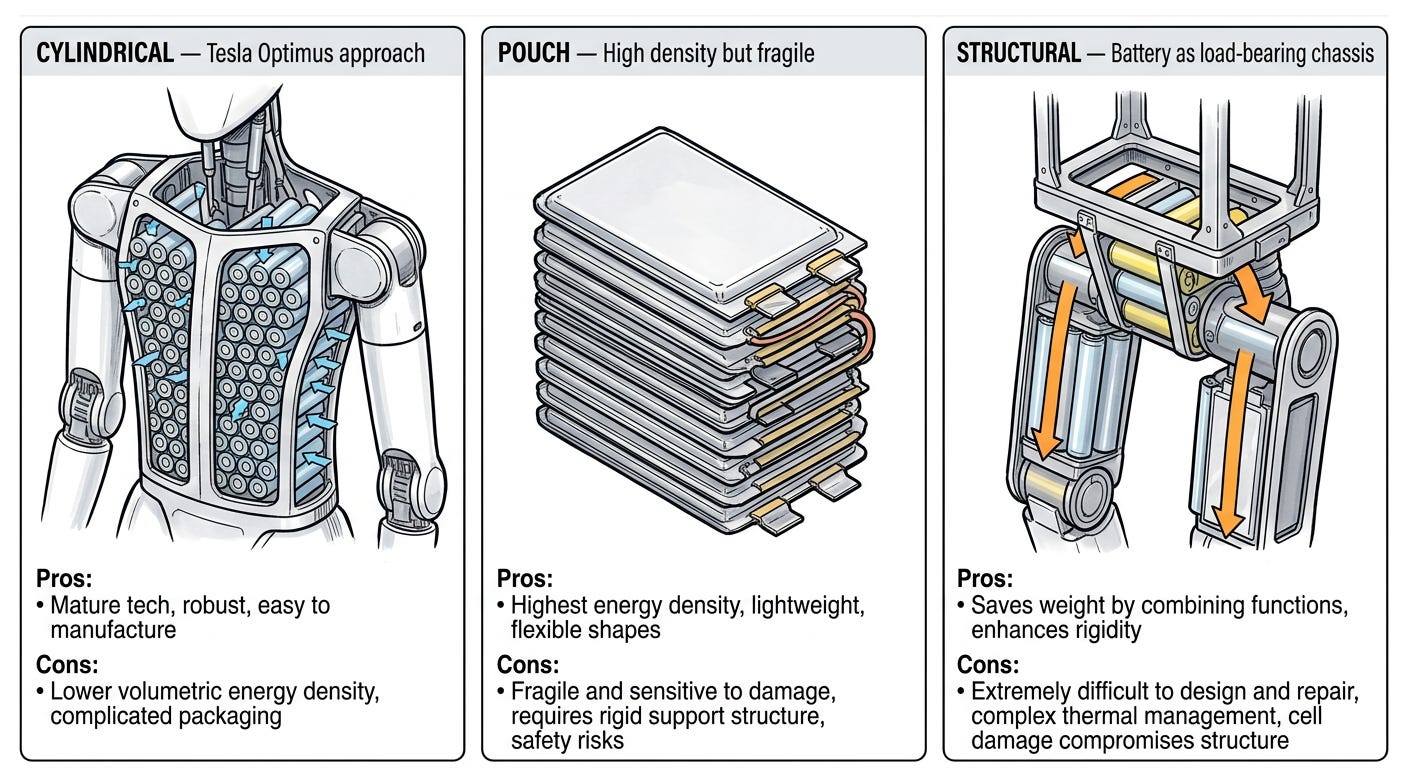
Three paths to the robot battery: cylindrical cells in a traditional pack, flexible pouch cells conforming to the body, and structural batteries that serve as load-bearing chassis elements. Each trades off density, manufacturability, and mechanical integration. Source: Machine Narrative Research.
The structural battery idea
Let me tell you about something remarkable that happened with electric aircraft.